
An elektromagnetisk relæ fungerer som en elektrisk styret omskifter, der bruger en elektromagnetisk spole med lav effekt til at generere et magnetfelt, tiltrækker et anker og mekanisk åbner eller lukker kontakter, og derved skifter et højeffekts belastningskredsløb. Dette giver galvanisk isolation og gør det muligt for lavspændingslogik at styre højspændings-/højstrømsystemer sikkert. Typiske småsignalrelæer håndterer styrestrømme så lave som 20mA, mens de skifter belastninger op til 10A/250V AC, hvilket beviser den grundlæggende "små kontroller store"-kapacitet.
Elektromagnetiske relæer er afhængige af Amperes lov og magnetiske tiltrækning. Når en strøm passerer gennem relæspolen, producerer den en magnetisk flux, der går gennem en ferromagnetisk kerne, åg og armatur. Den resulterende magnetiske kraft overvinder fjederspændingen og trækker ankeret mod kernen. Det bevægelige armatur overfører bevægelse til kontaktfjederen og ændrer kontakternes tilstand (normalt åben lukker, normalt lukket åbner). Når spolestrømmen er fjernet, returnerer fjederen ankeret til dets hvileposition.
Vigtige praktiske data: Typiske elektromagnetiske relæer udviser pickup-spænding (skal fungere) ved 70-75 % af den nominelle spolespænding. For et 12V DC-relæ trækker ankeret pålideligt ind ved ≈8,4V DC, mens udfaldsspændingen (udløsnings-) er omkring 10% af den nominelle (≈1,2V DC), hvilket sikrer hysteresemargin. Spoleeffekt varierer typisk fra 200mW til 1,2W afhængig af relæstørrelse.
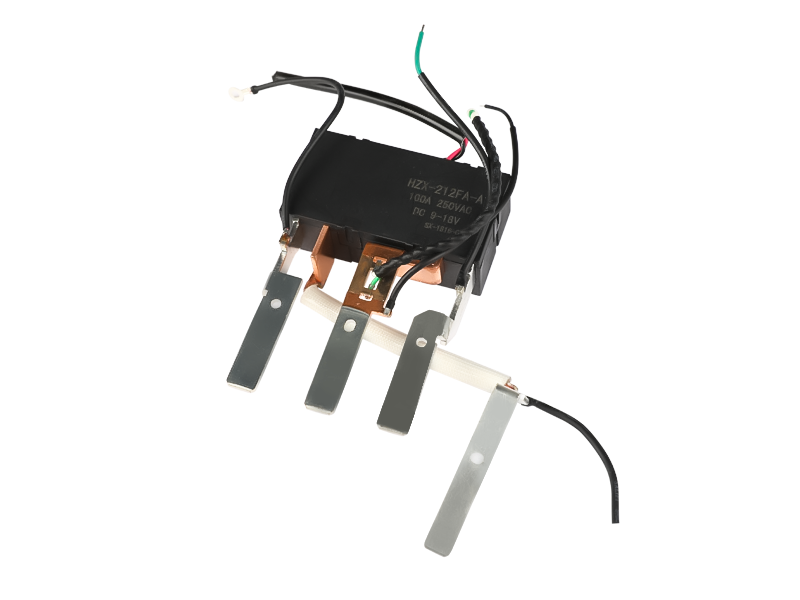
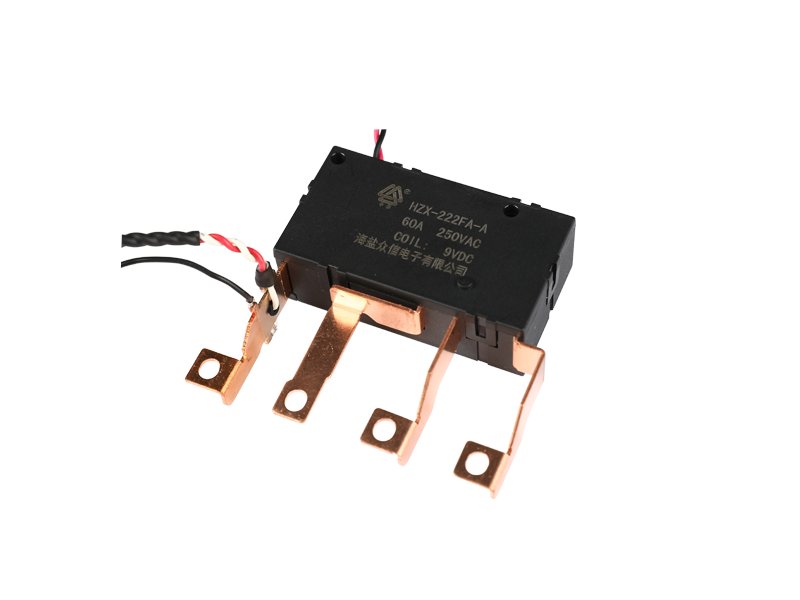
Hvert elektromagnetisk relæ består af flere forskellige dele, der samarbejder for at opnå pålidelig kobling. At forstå hver del hjælper med design og fejlfinding.
Strukturelt eksempel: I et DC-relæ med høj kapacitet til energilagring slukker dobbeltbrudskontakter og magnetiske udblæsningsbuer effektivt, hvilket forlænger den elektriske levetid ud over 100.000 cyklusser ved 450VDC/50A.
Elektromagnetisk relækobling følger en deterministisk sekvens: Spolespænding → fluxopbygning → ankeroptager → kontaktoverførsel → stabil ON-tilstand. Når strømmen er afbrudt, begynder den modsatte cyklus. Faktisk timing er afgørende for beskyttelses- og sekventeringsapplikationer.
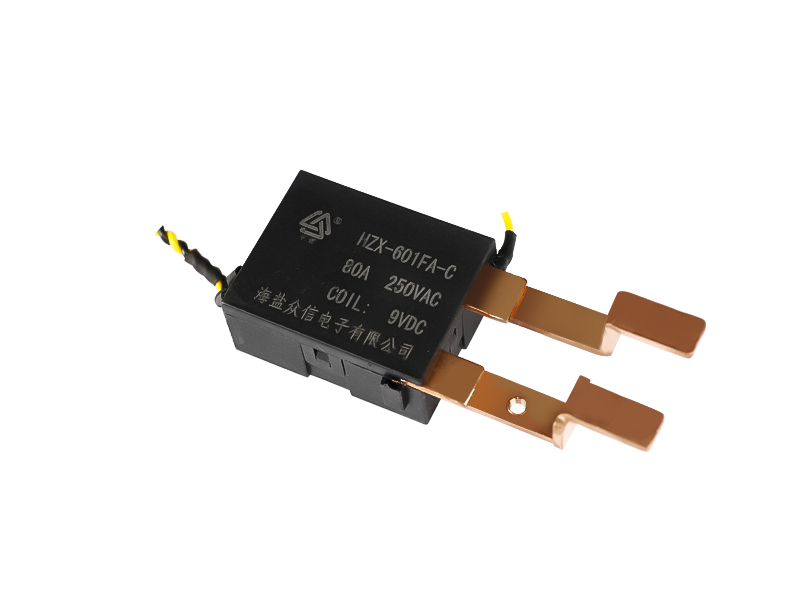
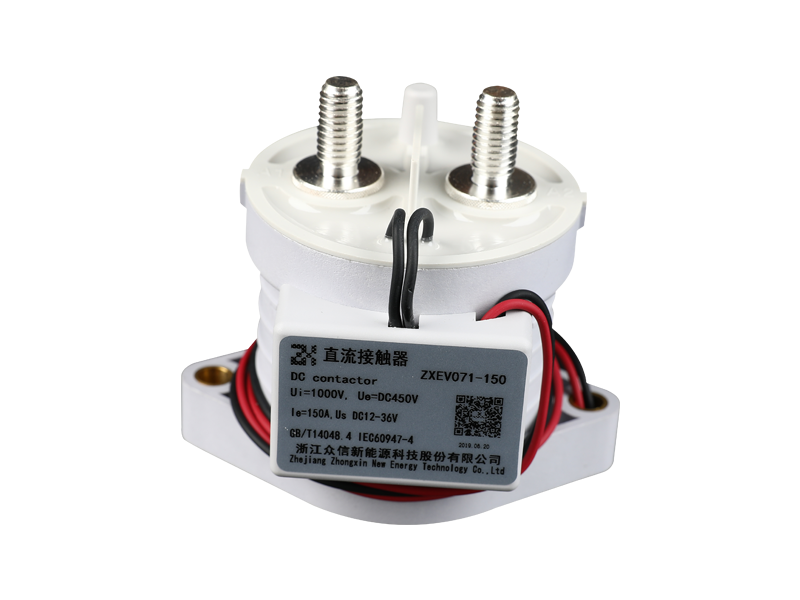
Til højspændings DC-applikationer (EV-opladning, fotovoltaiske invertere) bruger forseglede polariserede relæer permanente magneter for at opnå hurtigere drift (<5ms) og reduceret kontakterosion. Designere skal tage højde for startstrøm, som kan være 5–10× steady-state værdi; relækontakter kræver tilstrækkelig derating.
Valg af et elektromagnetisk relæ kræver evaluering af spoleværdier, kontaktklassificeringer og miljøgrænser. Tabellen nedenfor opsummerer typiske værdier for generelle formål og effektrelæer, som giver en praktisk reference for ingeniører.
| Parameter | Typisk rækkevidde / eksempel | Indflydelse på udvælgelse |
|---|---|---|
| Spole nominel spænding | 5V, 12V, 24V DC, 110V AC | Styresignalkompatibilitet |
| Spolemodstand | 60Ω (5V) til 1,2kΩ (24V) | Bestemmer spolestrømtræk og driverkrav |
| Maksimal koblingsspænding | 250V AC / 30V DC (generelt) – op til 1000VDC (DC-strømrelæer) | Lysbueundertrykkelse og isoleringsgrad |
| Nominel kontaktstrøm | 2A – 40A (strømrelæer) | Belastningstype: resistiv vs induktiv derating (typisk faktor 0,3 for induktive belastninger) |
| Elektrisk levetid (resistiv belastning) | 100.000 – 1.000.000 operationer | Krav til applikationens levetid |
| Mekanisk liv | 10 millioner – 50 millioner cyklusser | Højfrekvent switching egnethed |
Designnote: Til induktive DC-belastninger (motorer, solenoider) skal du bruge tilbageslagsdioder på tværs af spolen og passende bueundertrykkelse (RC-snubber over kontakter) for at forlænge relæets levetid med op til 5× sammenlignet med ubeskyttet kobling.
Implementering af elektromagnetiske relæer i systemer i den virkelige verden kræver opmærksomhed på spoledrevmargener, kontaktbeskyttelse og termisk styring. Nedenfor er praktiske anbefalinger understøttet af almindelig ingeniørpraksis.
Dataeksempel: I bilapplikationer oplever relæer, der arbejder ved 85°C omgivelsestemperatur, 20 % reduceret spolekraft; valg af et relæ med en nominel spolespænding på 12V og 8V pull-in garanterer robust aktivering selv under spændingsfald ned til 9V (ISO 16750-2).
At vælge den rigtige elektromagnetiske relætopologi forbedrer systemets effektivitet og sikkerhed. Almindelige typer er baseret på kontaktformular, koblingskapacitet og miljømæssig robusthed.
Valgtip: Kontroller altid brudkapaciteten for DC-belastninger, fordi DC-buer er sværere at slukke end AC. En tommelfingerregel: DC-brudspændingen for et relæ er typisk 30-50 % af dets AC-mærke. For højspændings-DC-applikationer, prioriter relæer, der er specifikt klassificeret til DC-omskiftning med magnetisk udblæsningsteknologi.
Det følgende diagram illustrerer den funktionelle sekvens af et typisk elektromagnetisk relæ, fra indgangskommando til belastningsskift.
Realtidsparametre: Den faktiske driftstid omfatter spoleinduktansforsinkelse (L/R tidskonstant) plus mekanisk inerti. For et 12V, 360Ω relæ (L ≈ 0,4H), elektrisk tidskonstant τ ≈ 1,1ms, og samlet driftstid ≈8ms ved nominel spænding. Designere kan accelerere responsen ved at øge spændingen momentant (f.eks. 200 % nominel spænding i 10ms).
Q1: Hvad er forskellen mellem pick-up spænding og dropout spænding?
Pick-up spænding (must-operate) er spolespændingen, der sikrer, at alle kontakter pålideligt skifter tilstand. Udfaldsspænding er den spolespænding, ved hvilken relæet garanteres at udløses. Hysteresen sikrer stabil drift og undgår skravling. Standardforhold: pick-up ≈ 70 %V nom , udfald ≈ 10 %V nom .
Q2: Hvordan påvirker den omgivende temperatur det elektromagnetiske relæs ydeevne?
Temperaturstigning øger spolens modstand, hvilket reducerer tilgængelige ampere-omdrejninger. For hver 20°C over 20°C stiger pick-up-spændingen med ~8%. Den tilladte spoletemperatur (isoleringsklasse) begrænser kontinuerlig drift. Det anbefales at reducere spolespændingen med 10 % ved høj omgivelsestemperatur for lang levetid.
Q3: Kan jeg bruge et AC-klassificeret relæ til DC-belastninger?
Det anbefales ikke uden omhyggelig verifikation. AC-relæer er afhængige af nul-gennemgang for at slukke lysbuer; DC-buer er kontinuerlige og forårsager hurtig kontakterosion. Medmindre relædataarket eksplicit angiver DC-koblingsklassificeringer, skal du vælge et dedikeret DC-relæ eller bruge en hybrid tilgang med ekstern bueundertrykkelse.
Q4: Hvad er almindelige fejltilstande for elektromagnetiske relæer?
Kontaktsvejsning (høj inrush), spoleudbrænding (overspænding eller langvarig overophedning), kontaktkorrosion (utilstrækkelig tætning for fugt) og mekanisk træthed efter millioner af cyklusser. Korrekt derating og spoleundertrykkelse reducerer disse fejl drastisk.
Q5: Hvordan vælger man mellem et solid state-relæ og et elektromagnetisk relæ?
Elektromagnetiske relæer tilbyder ubetydelig lækstrøm, når de er slukket (<1µA), galvanisk isolation, lav on-modstand (mΩ) og modstår godt overspændinger. Brug EM-relæer til høj effektivitet, lav varmeudvikling og blandede belastninger. SSR passer til højfrekvent switching og lydløs drift, men har højere off-state lækage og spændingsfald.
Teknisk oversigt: Elektromagnetiske relæer giver robust, økonomisk galvanisk isolering med dokumenteret pålidelighed. Ved at forstå grundlæggende parametre – spoleoptagelse/udfald, kontaktmateriale og belastningsspecifik derating – kan ingeniører opnå årtiers vedligeholdelsesfri drift i applikationer lige fra bilindustrien til vedvarende energisystemer.




Copyright © 2015-2021, Zhejiang Zhongxin New Energy Technology Co., Ltd. Alle rettigheder forbeholdes Teknisk support:Smart sky Producenter af elektromagnetiske relæer China Relays Factory


 engelsk
engelsk
